






Панҷ меҳвари Маркази коркарди амудии CV Силсилаи











Вижагиҳо
Муаррифии мошин
Маркази коркарди амудии панҷ меҳвари силсилаи CV дорои хусусиятҳои сахтгирии баланд, дақиқии баланд ва самаранокии коркарди баланд мебошад. Дар сутун як тарҳи herringbone бо фосилаи калон қабул, ки метавонад хеле баланд бардоштани қувваи мепечонад ва torsion аз сутун; мизи корӣ як фосилаи оқилонаи слайдерро қабул мекунад ва рӯи он хомӯш карда мешавад, то қувваи мизи корӣ яксон бошад ва сахтӣ беҳтар шавад; бистари қабул салиб-сессияи trapezoidal, кам кардани Маркази вазнинии беҳтар қувват torsion; тамоми мошин таҳлили унсурҳои ниҳоӣ барои тарҳрезии ҳар як ҷузъро истифода мебарад, то устувории беҳтаринро таъмин кунад.
Ҷойгиршавии босуръати се меҳвар метавонад ба 48М / дақиқа расад, вақти иваз кардани асбоби TT ҳамагӣ 2,5С аст, маҷаллаи асбобҳо барои 24t пурра пур карда мешавад. Он барои моделҳои гуногуни 2D ва 3D concave-convex бо шаклҳои мураккаб ва пуфакҳо ва сатҳи мураккаб мувофиқ аст. Он инчунин барои фрезеркунӣ, пармакунӣ, васеъкунӣ, дилгиркунанда, Тафт ва дигар равандҳои коркард мувофиқтар аст, ки барои ҳам партияҳои хурд ва ҳам миёнаи коркард ва истеҳсоли гуногунранг мувофиқанд ва инчунин метавонанд дар хатҳои автоматӣ барои истеҳсоли оммавӣ истифода шаванд.
Намоиши графикии динамикии треки асбоб, дисплейи огоҳии интеллектуалӣ, ташхиси худидоракунӣ ва дигар вазифаҳо истифода ва нигоҳдории асбоби мошинро қулай ва тезтар мекунанд; Иқтидори хониш то 3000 сатр/сония зиёд карда мешавад, ки ин интиқоли зуд ва муассир ва коркарди онлайни барномаҳои пуриқтидорро осон мекунад.
RTCP (Central Tool Rotation Point) маркази коркарди панҷ меҳвар вазифаи назорати нуқтаи нӯги асбоб мебошад. Пас аз фурӯзон кардани функсияи RTCP, контроллер аз назорати ибтидоии чеҳраи ниҳоии дорандаи асбоб ба назорати нуқтаи нӯги асбоб иваз мешавад. Маслиҳати асбобе, ки дар поён оварда шудааст, метавонад хаттиеро, ки аз меҳвари гардиш ба вуҷуд омадааст, ҷуброн кунад. Хато барои пешгирии бархӯрди асбоб. Дар нуқтаи А қисмати кор хати марказии меҳвари асбоб бевосита аз ҳолати уфуқӣ ба ҳолати амудӣ мегузарад. Агар хатои хаттй ислох карда нашавад, нӯги асбоб аз нуқтаи А дур мешавад ва ё ҳатто ба қисмҳои корӣ ворид шуда, боиси садамаи ҷиддӣ мегардад. Азбаски ҳаракати пайвастаи меҳвари гардиш ва меҳвари гардиш боиси тағирёбии мавқеи нуқтаи А мегардад, мавқеи аслии нӯги асбоб дар барнома бояд ислоҳ карда шавад, то координатҳои мавқеъи нӯги асбоб нисбат ба нуқтаи А ҳамеша бетағйир бошанд, гӯё нӯги асбоб бо нуқтаи А ҳаракат мекунад, ин нӯги Асбоби зерин аст.
Ин функсия дорои 0 ~ 9 сатҳ аст, сатҳи 9-ум дақиқтарин аст, дар ҳоле ки сатҳи 1-8-ум хатогии паси серворо ҷуброн мекунад ва ба роҳи коркард ҳамворӣ медиҳад.
Суръати баланд ва дақиқи баланд коркарди сеченака
Шпиндели баландсуръат, назорати коркарди камонҳои 3D метавонад 2000 блокро пешакӣ хонад ва ислоҳи роҳи ҳамворро барои коркарди баландсуръат ва дақиқи баланд.
Сохтори устувории баланд
Шакли сохторро такмил диҳед ва тақсимотро оптимизатсия кунед, то мустаҳкамии мошинро баланд бардоред. Шакли асбоб ва сутун ва оптимизатсияи тақсимот шакли мувофиқтарин тавассути таҳлили CAE мебошанд. Тадбирҳои гуногуни такмилёфта, ки дар берун ноаёнанд, қобилияти устувори буриданро инъикос мекунанд, ки суръати шпиндель нишон дода наметавонад.
Мушаххасоти техникӣ
| Адад | воҳиди | CV200 | CV300 | CV500 | |
| Сафар
| Сафари меҳвари X/Y/Z | mm | 500×400×330 | 700*600*500 | 700×600×500 |
| Масофа аз рӯи охири шпиндель то сатҳи мизи корӣ | mm | 100-430 | 150-650 | 130-630 | |
| Масофа аз маркази шпиндель то сатҳи роҳи оҳани сутун | mm | 412 | 628 | 628 | |
| Масофаи максималии байни маркази шпиндели A-меҳвари 90° ва сатҳи диски меҳвари C | mm | 235 | 360 | 310 | |
| 3 меҳвари ғизо
| Ҷойгиршавии босуръати меҳвари X/Y/Z | м/дақ | 48/48/48 | 48/48/48 | 36/36/36 |
| Меъёри буридани ғизо | мм/дақ | 1-24000 | 1-24000 | 1-24000 | |
| Шпиндель
| Мушаххасоти шпиндель (диаметри насб/ҳолати интиқол) | mm | 95 / мустақим | 140 / мустақим | 140 / мустақим |
| Конуси шпиндель | mm | BT30 | BT40 | BT40 | |
| Суръати шпиндель | р/дақ | 12000 | 12000 | 12000 | |
| Қувваи муҳаррики шпиндель (пайваста/S3 25%) | kW | 8.2/12 | 15/22.5 | 15/22.5 | |
| Моменти муҳаррики шпиндель (давом/S3 25%) | Нм | 26/38 | 47,8/71,7 | 47,8/71,7 | |
| Маҷаллаи асбобҳо
| Иқтидори маҷалла | T | 21Т | 24Т | 24Т |
| Вақти тағир додани асбоб (TT) | s | 2.5 | 4 | 4 | |
| Диаметри Max.Tool (асбоби пурра/асбоби холӣ) | mm | 80 | 70/120 | 70/120 | |
| Дарозии ҳадди аксар | mm | 250 | 300 | 300 | |
| Макс. Вазни асбоб | kg | 3 | 8 | 8 | |
| Роҳнамо
| Дастури меҳвари X (андоза/шумораи слайдерҳо) | mm | 30/2 | 35/2 ролик | 45/2 ролик |
| Дастури меҳвари Y (андоза/миқдори слайдерҳо) |
| 30/2 | 35/2 ролик | 45/2 ролик | |
| Дастури меҳвари Z (андоза/миқдори слайдерҳо) |
| 30/2 | 35/2 ролик | 45/2 ролик | |
|
Бурида
| Буридани меҳвари X |
| Φ28×16 | Φ40×16 | Φ40×16 |
| Буридани меҳвари Y |
| Φ28×16 | Φ40×16 | Φ40×16 | |
| винти меҳвари Z |
| Φ32×16 | Φ40×16 | Φ40×16 | |
| Дақиқӣ
| Аниқии ҷойгиршавӣ | mm | ±0,005/300 | ±0,005/300 | ±0,005/300 |
| Такрорпазирӣ | mm | ±0,003/300 | ±0,003/300 | ±0,003/300 | |
| 5 меҳвар
| Усули гардонандаи гардиш |
| Мотер бевосита | Камераи ролик | камераи ролик |
| Диаметри гардишгар | mm | Φ200 | Φ300*250 | φ500*400 | |
| Вазни бори иҷозатдодашудаи гардиши табақ (дар уфуқӣ/моил) | kg | 40/20 | 100/70 | 200 | |
| A/C-меҳвари макс. суръат | чархзании | 100/230 | 60/60 | 60/60 | |
| Ҷойгиркунии меҳвари A/такрорпазирӣ | камон-сек | 10/6 | 15/10 | 15/10 | |
| Ҷойгиркунии меҳвари C/такрорпазирӣ | камон-сек | 8/4 | 15/10 | 15/10 | |
| Молидани
| Иктидори агрегати молиданй | L | 1.8 | 1.8 | 1.8 |
| Навъи ҷудокунандаи равған |
| ҳаҷмӣ | Молидани равған | ҳаҷмӣ | |
| Дигарон
| Талаботи ҳаво | кг/с㎡ | ≥6 | ≥6 | ≥6 |
| Ҷараёни манбаи ҳаво | мм3/дақ | ≥0,2 | ≥0,4 | ≥0,4 | |
| иқтидори батарея | КВА | 10 | 22.5 | 26 | |
| Вазни мошин (маҷмӯӣ) | t | 2.9 | 7 | 8 | |
| Андозаҳои механикӣ (L × В × H) | mm | 1554×2346×2768 | 2248*2884*2860 | 2610×2884×3303 | |
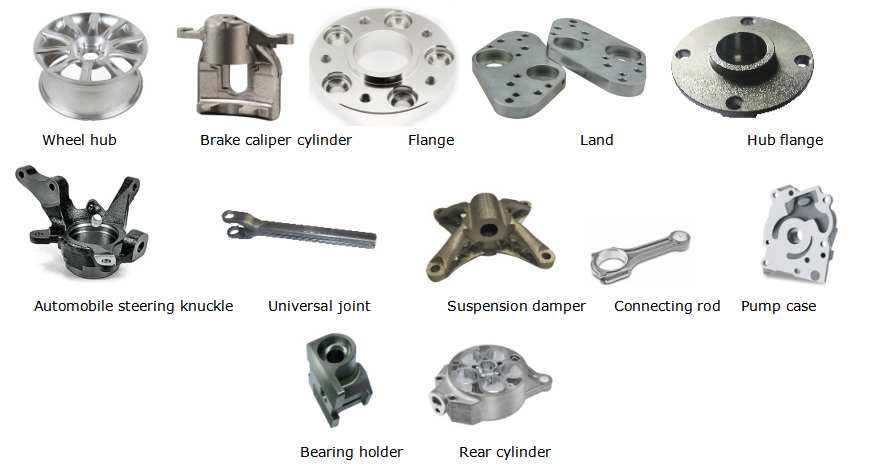
Намунаи коркард
1.Саноати автомобилӣ
2. Таҷҳизоти дақиқ

3.Саноати ҳарбӣ






