BOSM -Уфуқӣ Counter пармакунӣ ва мошини дилгиркунанда
1. Истифодаи таҷҳизот:
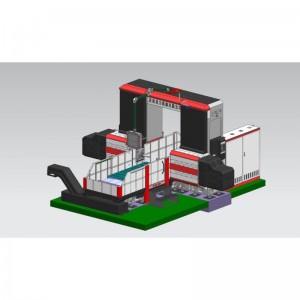
Мошини пармакунии уфуқӣ ва дилгиркунанда BOSM як мошини махсус барои ширкати шумо барои коркарди сарпӯшҳои кранҳои маноравӣ мебошад.Мошин бо 2 маҷмӯаи пармакунии уфуқӣ ва дилгиркунанда муҷаҳҳаз шудааст, ки метавонанд пармакунӣ, фрезерӣ ва дилгиркунии қисмҳои корро дар доираи диапазони зарбаи самаранок амалӣ кунанд.Буридан ва коркарди дигар, суръати ҷойгиркунии таҷҳизот зуд аст, дақиқии коркард баланд аст ва самаранокии коркард баланд аст.
2. Хусусиятҳои сохтори таҷҳизот:
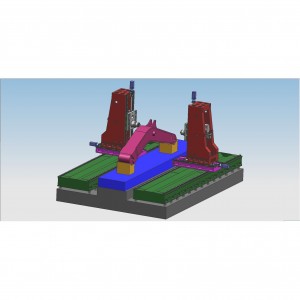
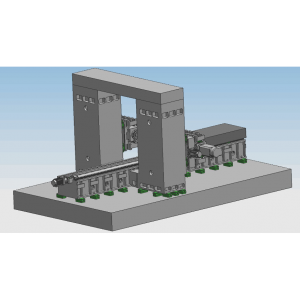
2. 1. Қисмҳои асосииМошин
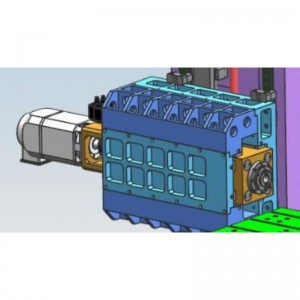
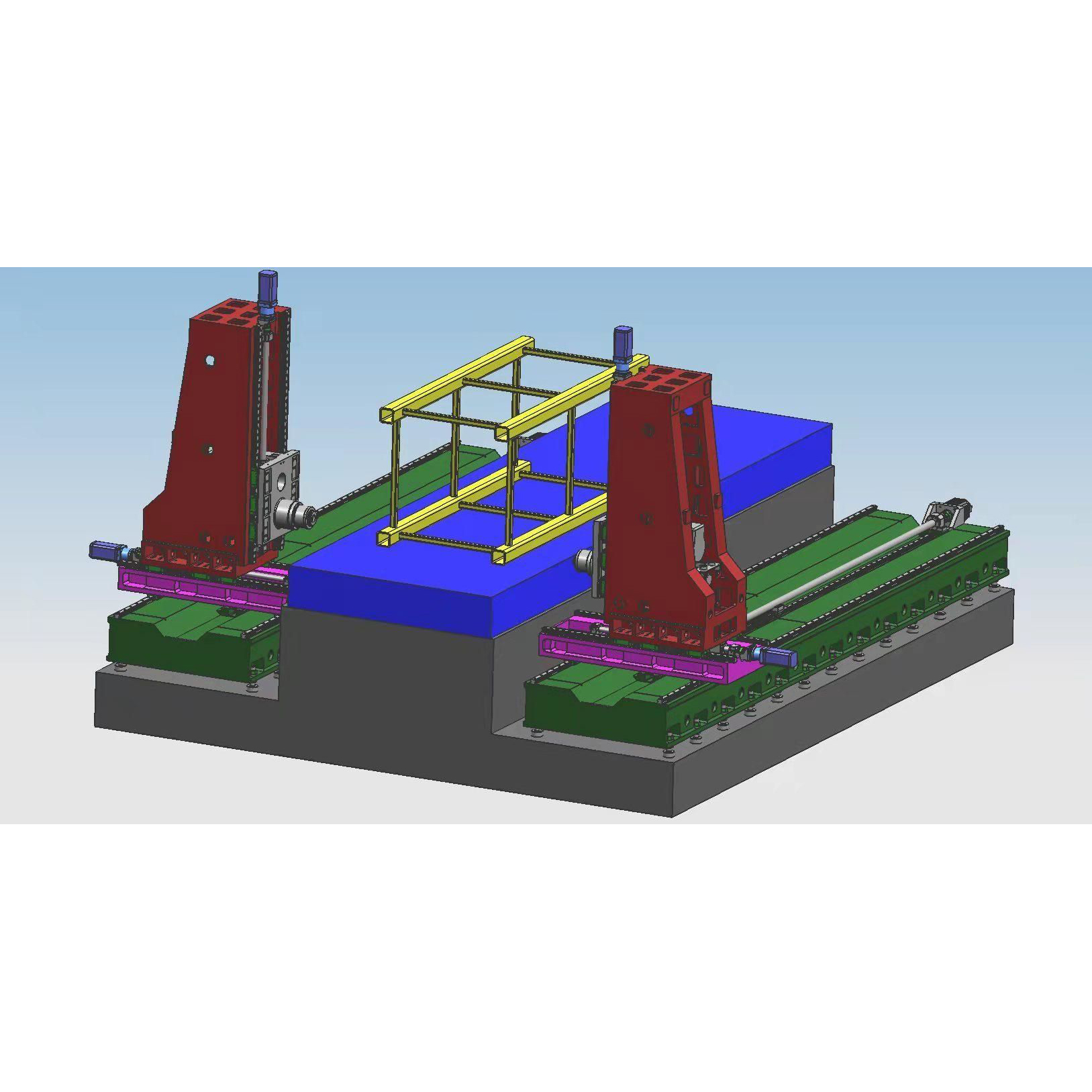
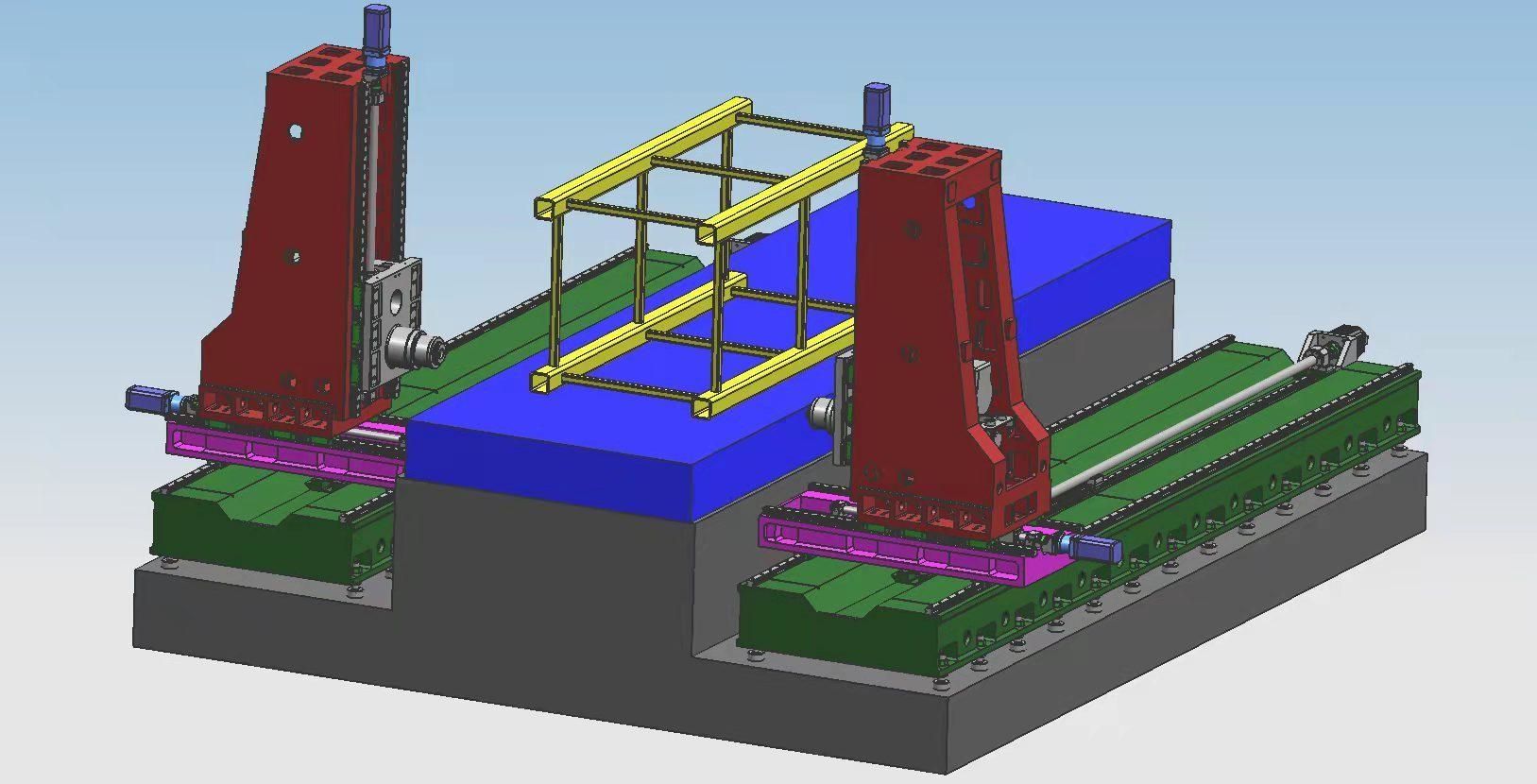
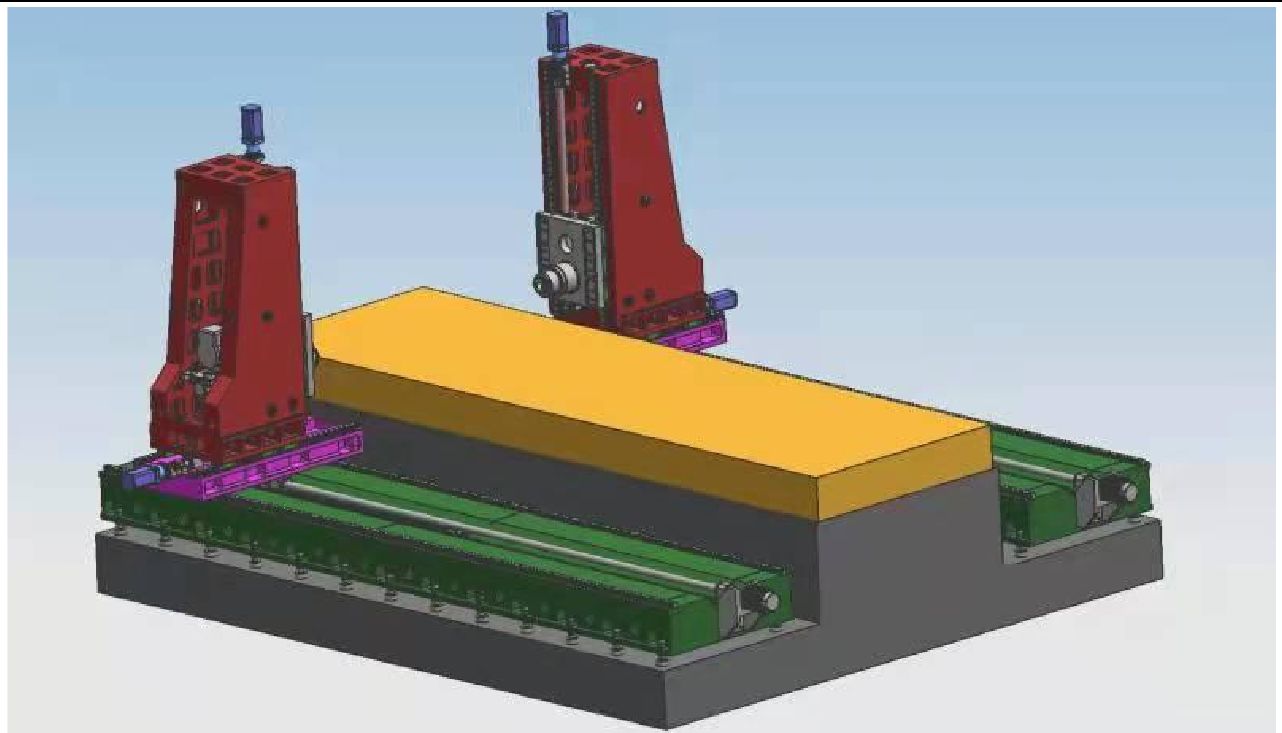
Ҷузъҳои асосии Мошин: кат, мизи корӣ, сутунҳои чап ва рост, зинҳо, қӯчқорҳо ва ғайра, қисмҳои калон аз қолаби реги қатронӣ, оҳани хокистарии баландсифати 250, дар чоҳи реги гарм тоза карда мешаванд→ пиршавии ларзиш→гарм коркарди печи → пиршавии ларзиш → коркарди ноҳамвор → пиршавии ларзиш → тафси печи → пиршавии ларзиш → анҷом додани фишори манфии қисмҳо ва мӯътадил нигоҳ доштани кори қисмҳо.Дастгоҳи кории таҷҳизот собит аст ва саракҳои барқии ҳарду тараф метавонанд дар самтҳои пеш ва паси пойгоҳ ҳаракат кунанд;Мошин дорои вазифаҳои ба монанди пармакунӣ, дилгиркунӣ, зарба задан, ламс кардан ва ғайра мебошад. Усули хунуккунии асбоб сардшавии дохилӣ ва хунуккунии беруна мебошад.Мошин дорои 5 меҳвари ғизоӣ, 2 сари қудрати буридан мебошад, ки онҳоро дар як вақт бо 5 меҳвар ҳамоҳанг кардан мумкин аст ё метавонад якдафъаина бошад.Самти меҳвари Мошин ва сари қудрат дар расми зер нишон дода шудааст.
2. 2 Сохтори асосии қисми интиқоли меҳвари
2.2.1 Меҳвари X: Сарвари барқ ба паҳлӯ дар баробари роҳи роҳнамоии пойгоҳ ҳаракат мекунад.
Диски меҳвари X1: муҳаррики серво AC ва инчунин редуктори сайёраи дақиқи баланд барои рондани сари барқ тавассути диски винти тӯб барои амалӣ кардани ҳаракати хаттии меҳвари X истифода мешавад.
Интиқоли меҳвари X2: муҳаррики серво AC ва инчунин редуктори сайёраи дақиқи баланд барои рондани сари қудрат тавассути интиқоли винти тӯб барои амалӣ кардани ҳаракати хаттии меҳвари X истифода мешавад.
Шакли роҳи роҳнамо: Ду рельси роҳнамоии дақиқи пурқувват дар заминаи васеъшуда плитка карда шудааст.
2.2 Меҳвари Y1: Сарвари барқ дар сутун ба боло ва поён ҳаракат мекунад.
Диски меҳвари Y1: Моторҳои AC-серворо қабул кунед, то тавассути винти тӯб гузаронед, то ҳаракати хаттии меҳвари Y1-ро амалӣ созед.Шакли роҳи оҳан: 4 адад 45 намуди релсҳои роҳнамоии хатӣ.
2.2.3 Меҳвари Y2: Сарвари барқ дар сутун ба боло ва поён ҳаракат мекунад.
Интиқоли меҳвари Y2: муҳаррики серво AC барои рондан тавассути винти тӯб барои амалӣ кардани ҳаракати хаттии меҳвари Y1 истифода мешавад.
Шакли роҳи оҳан: 4 адад 45 намуди релсҳои роҳнамоии хатӣ.
2.2.4 Меҳвари Z1: Сарвари барқ дар болои зин ба пеш ва пас бармегардад.
Интиқоли меҳвари Z1: муҳаррики серво AC ва редуктори сайёраи дақиқ барои пешбурди ҳаракат тавассути винти тӯб барои амалӣ кардани ҳаракати хаттии меҳвари Z1 истифода мешавад.
2.2.5 Меҳвари Z2: Сарвари барқ дар болои зин ба пеш ва пас бармегардад.
Интиқоли меҳвари Z2: муҳаррики серво AC ва редуктори сайёраи дақиқ барои пешбурди ҳаракат тавассути винти тӯб барои амалӣ кардани ҳаракати хаттии Z2 истифода мешаванд.
2.3. Хориҷ кардани чип ва хунуккунӣ
Дар зери дастгохи корй дар ду тараф конвейерхои чипхои занчири хамвор гузошта шудаанд ва чипхои оханиро дар охир ба конвейери чип холй кардан мумкин аст, то ки истехсолоти мутамаддинро ба амал барорад.Дар зарфи сардкунандаи конвейери чип насоси хунуккунӣ мавҷуд аст, ки онро барои хунуккунии дохилӣ + хунуккунии берунии асбоб истифода бурдан мумкин аст, то кор ва мӯҳлати хидмати асбобро таъмин кунад ва яхдонро дубора коркард кардан мумкин аст.
3.Системаи пурраи рақамии назорати рақамӣ:
3.1.Бо функсияи шикастани чип, вақти шикастани чип ва давраи шикастани чипро дар интерфейси одам-мошин муқаррар кардан мумкин аст.
3.2.Бо функсияи бардоштани асбоб, масофаи бардоштанро дар интерфейси одам-мошин муқаррар кардан мумкин аст.Хангоми расидан ба масофа асбоб зуд бардошта мешавад ва баъд чипхо партофта мешаванд ва баъд ба сатхи пармакунй зуд пеш рафта, ба таври автоматй ба кор табдил меёбанд.
3.2.Қуттии мутамаркази идоракунии амалиёт ва дастгоҳи дастӣ системаи идоракунии ададро қабул мекунанд ва бо интерфейси USB ва дисплейи булӯри моеъ муҷаҳҳаз шудаанд.Барои осон кардани барномасозӣ, нигоҳдорӣ, намоиш ва иртибот, интерфейси амалиётӣ дорои функсияҳо ба монанди муколамаи одам ва мошин, ҷуброни хатоҳо ва ҳушдордиҳии автоматӣ мебошад.
3.2.. Таҷҳизот дорои вазифаи пешнамоиш ва аз нав тафтиш мавқеи сӯрохи пеш аз коркард, ва амалиёт хеле қулай аст.
4.Молидани автоматӣ
Ҷуфтҳои роҳи оҳани роҳнамоии дақиқи мошин, ҷуфтҳои винти дақиқи тӯб ва дигар ҷуфтҳои ҳаракати дақиқ бо системаҳои молидани автоматӣ муҷаҳҳаз шудаанд.Насоси автоматии молиданӣ равғани фишорро мебарорад ва камераи миқдории равғани молиданӣ ба равған ворид мешавад.Вақте ки камераи нафт бо равған пур мешавад ва фишори система то 1,4 ~ 1,75 Мпа боло меравад, гузаргоҳи фишор дар система баста мешавад, насос қатъ мешавад ва клапани борфарорӣ дар як вақт холӣ карда мешавад.Вакте ки фишори равган дар рох аз 0,2Мпа паст мешавад, молидани микдори ба пур кардани нуктаи молидан шуруъ мекунад ва як пуркунии равганро ба анчом мерасонад.Аз сабаби миқдори дақиқи равғане, ки аз ҷониби равғани миқдорӣ дода мешавад ва қобилияти муайян кардани фишори система, таъминоти равған боэътимод аст ва кафолат медиҳад, ки дар рӯи ҳар як ҷуфти кинематикӣ плёнкаи равған мавҷуд аст, ки сурхшавӣ ва фарсудашавиро коҳиш медиҳад ва осебро пешгирӣ мекунад. ба сохтори дохилӣ, ки аз ҳад зиёд гармӣ ба вуҷуд омадааст., барои таъмин намудани дурустӣ ва ҳаёти Мошин.
5. Мошинмуҳити истифода:
Таъмини барқ: Се фаза AC380V±10%, 50Hz±1 Ҳарорати муҳити зист: -10°~ 45°
6.Меъёрҳои қабул:
JB / T10051-1999 "Мушаххасоти умумии техникӣ барои системаи гидравликии мошинҳои металлбурӣ"
7.Параметрҳои техникӣ:
| Модели | 2050-5З | |
| Андозаи максималии коркарди қисмҳои корӣ | Дарозӣ × паҳнӣ × баландӣ (мм) | 5000×2000×1500 |
| андозаи мизи корӣ | Дарозӣ X Бар (мм) | 5000*2000 |
| Самти ҳаракати пойгоҳи нерӯи барқ | Ба пеш ва қафо ҳаракат кунед (мм) | 5000 |
| Сари барқро боло ва поён кунед | Зарбаи боло ва поёни рам (мм) | 1500 |
|
Сарвари барқи пармакунии навъи уфуқӣ Сарвари барқ 1 2 | Миқдор (2 дона) | 2 |
| Конуси шпиндель | BT50 | |
| Диаметри пармакунӣ (мм) | Φ2-Φ60 | |
| Диаметри ламс (мм) | М3-М30 | |
| Суръати шпиндель (р/дақ) | 30 ~ 3000 | |
| Қувваи муҳаррики шпиндели серво (кВт) | 22*2 | |
| Сафар ба чап ва рост (мм) | 600 | |
| Дурустии ҷойгиркунии мавқеъ | 300мм*300мм | ±0,025 |
| Дурустии ҷойгиркунии такрории дуҷониба | 300мм*300мм | ±0,02 |