BOSM -6025 мухолифи-Сарвари дилгиркунанда мошини фрезер
1. Таҷҳизотистифода баред:
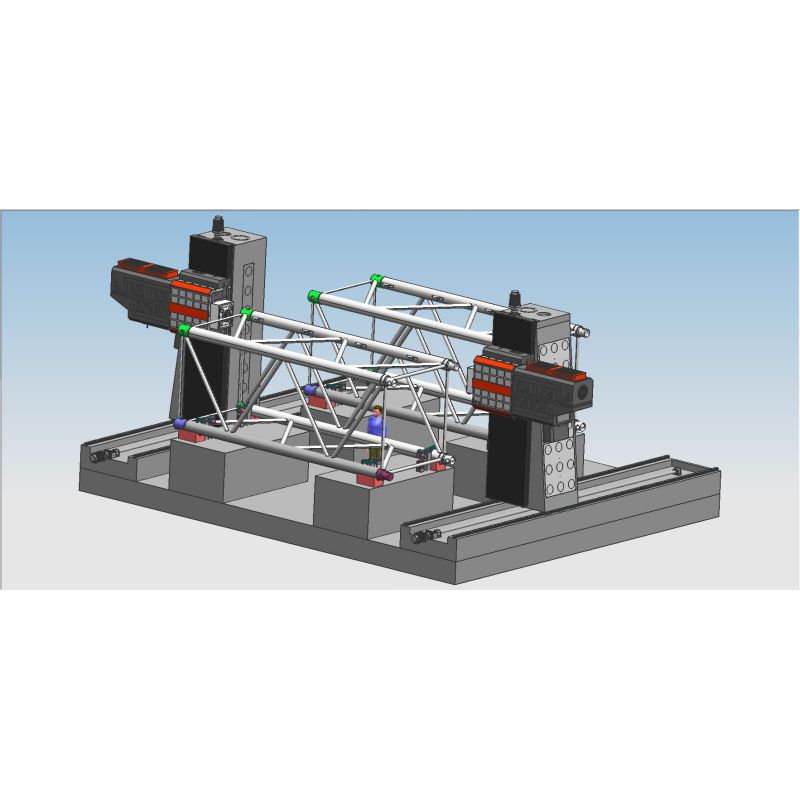
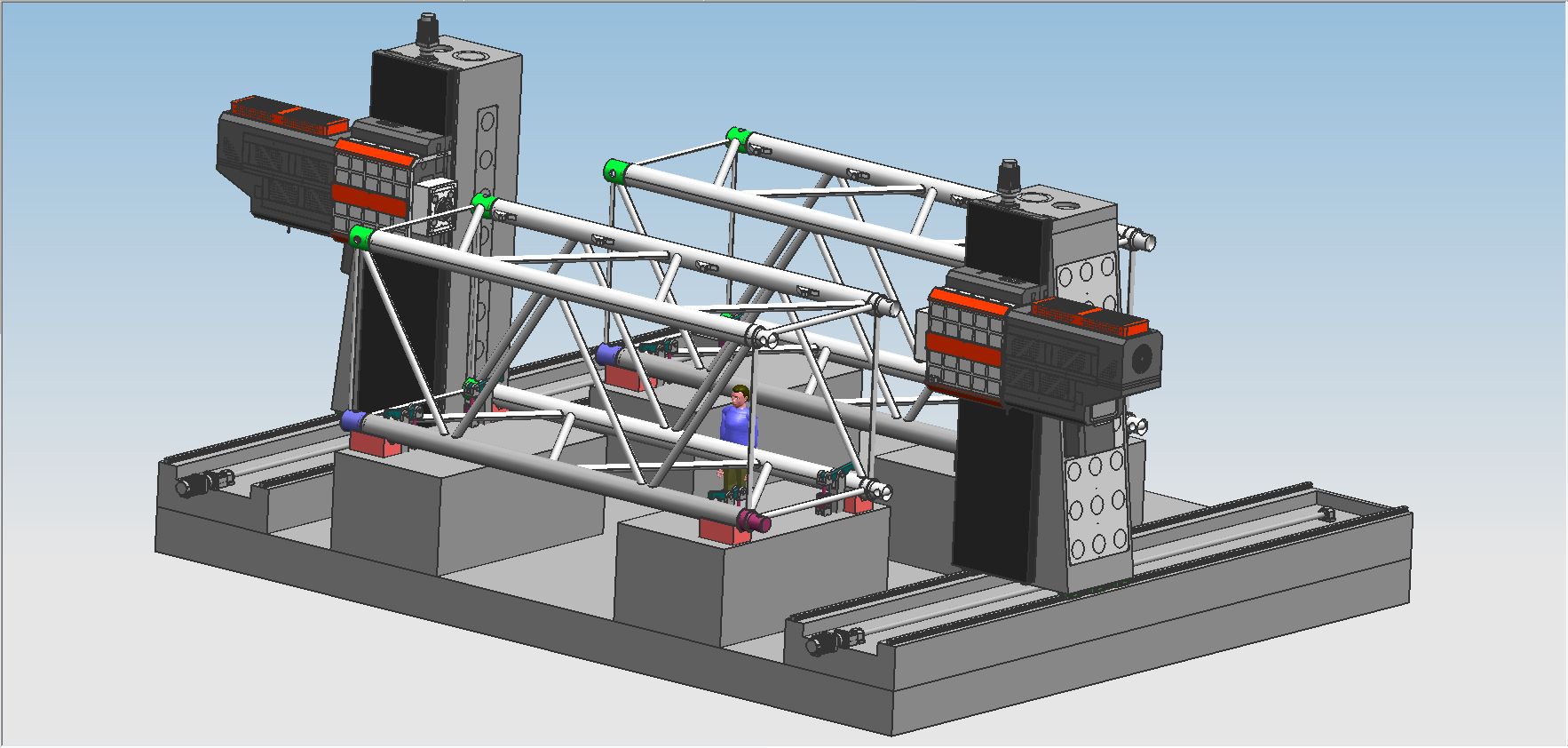
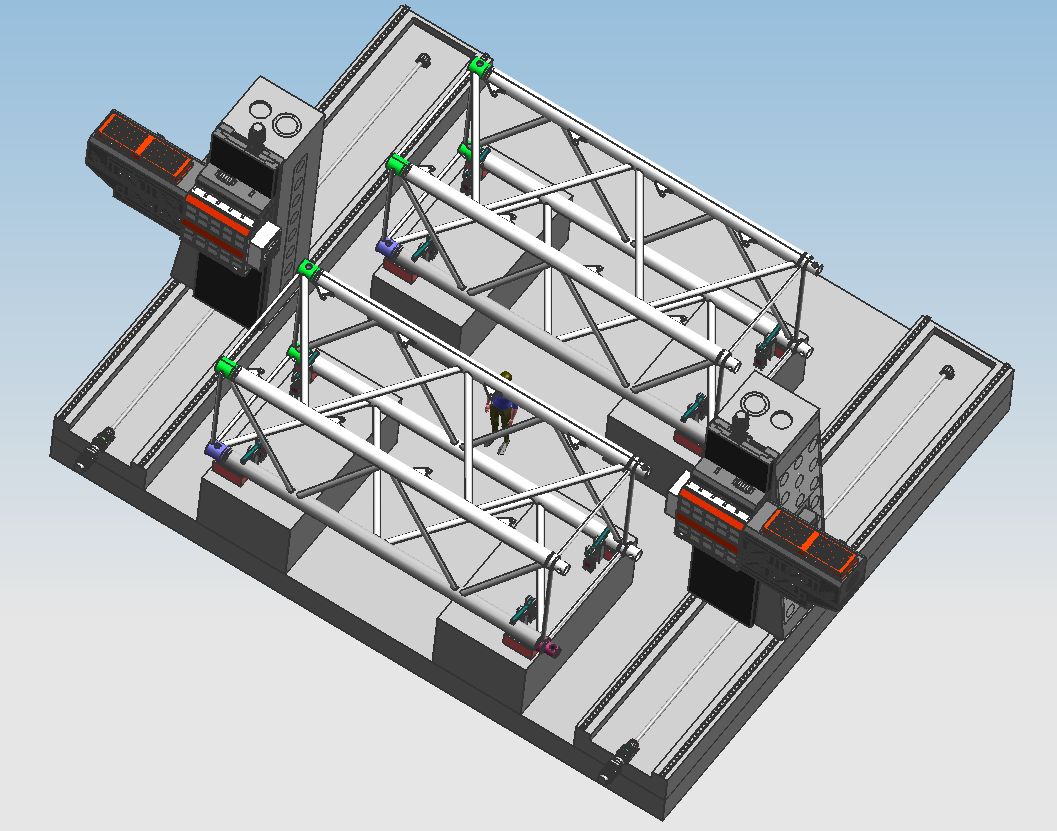
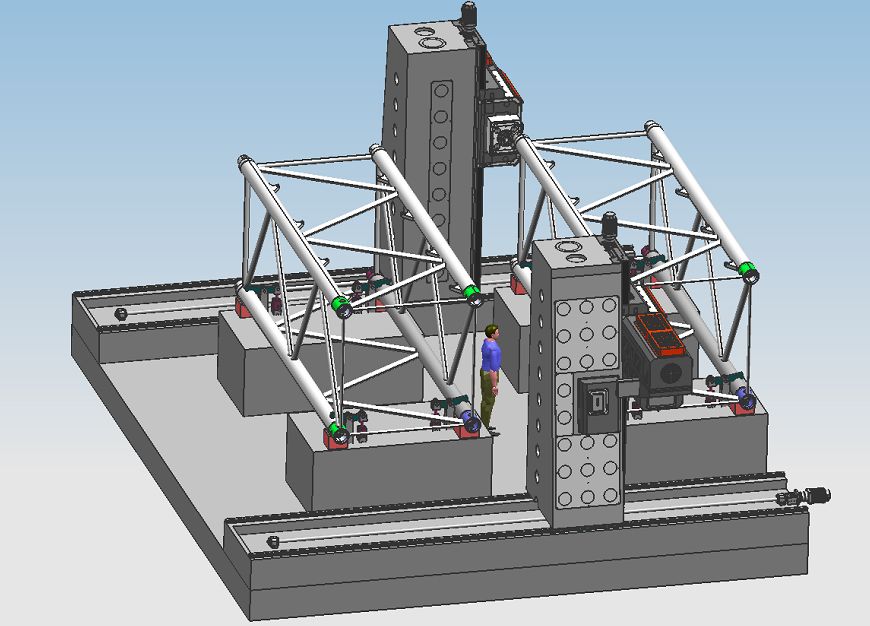
БОСМ-6025 стансияи дугона, сутуни амудии CNC-и ҳаракатшавандаи дугонаи сутуни сар-ба-сари пардозӣ ва фрезерӣ як мошини махсус барои қисмҳои симметрии мошинҳои сохтмонӣ мебошад. Асбоб бо сутуни махсуси ҳаракаткунанда ва ду маҷмӯи рамаҳои уфуқӣ муҷаҳҳаз шудааст, ки метавонанд пармакунӣ, фрезерӣ, буриш ва дигар коркарди порчаи корро дар доираи диапазони самарабахш амалӣ созанд, порчаи корро дар як вақт дар ҷои кор коркард кардан мумкин аст (ҳоҷат нест). барои исканҷаи дуввум), суръати тези боркунӣ ва борфарорӣ, суръати ҷойгиршавии зуд, дақиқии баланди коркард ва самаранокии баланди коркард.
2. Сохтори таҷҳизот:
2.1. Унсурхои асосии дастгох
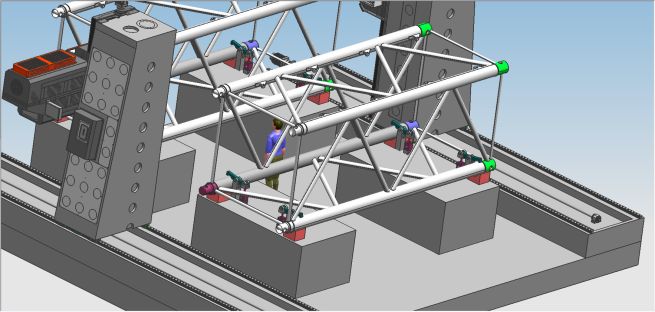
Бистар, мизи корӣ, сутунҳои чап ва рост, чӯбҳо, зинҳо, қӯчқорҳо ва дигар қисмҳои калон ҳама аз қолаби реги қатронӣ, оҳани хокистарии баландсифати 250 сохта шудаанд, ки дар чоҳи реги гарм гарм карда мешаванд→ пиршавии ларзиш → пиршавии ларзиши кӯраи гарм → пиршавии ларзиш→ коркарди ноҳамвор → пиршавии ларзиш → кӯраи гарм → пиршавии ларзиш → ба итмом расонидан, фишори манфии қисмҳоро комилан бартараф кунед ва кори қисмҳоро мӯътадил нигоҳ доред. Асбоби мошинсозӣ дорои вазифаҳо ба монанди фрезеркунӣ, дилгиркунӣ, пармакунӣ, зарба задан, ламс кардан ва ғайра мебошад ва усули хунуккунии асбоб хунуккунии беруна мебошад. Асбоб дорои 6 меҳвари ғизо мебошад, ки метавонад пайванди 4-меҳвар ва 6-меҳвари ягонаро амалӣ кунад. амал. 2 сари қудрат вуҷуд дорад. Самти меҳвари асбоб ва сари барқ дар расми зер нишон дода шудааст.
2. 2Сохтори асосии қисми интиқоли меҳвари
2.2.1 Меҳвари X 1/X2: Сутун ба дарозии қад-қади оҳани роҳнамои кати собит мутақобила мекунад.
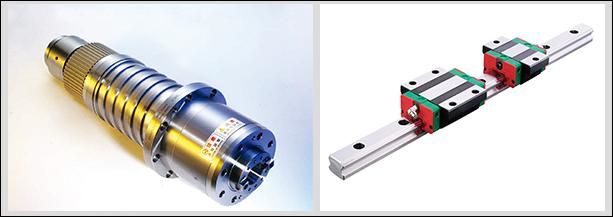
Интиқоли меҳвари X: муҳаррики серво AC ва редуктори сайёраи дақиқ барои рондани ду сутун тавассути интиқоли винти тӯб барои амалӣ кардани ҳаракати хаттии меҳвари X истифода мешаванд.
Шакли роҳи оҳан: ду рельси роҳнамоии дақиқи пурқувватро гузоред.
2.2.2 Меҳвари Y1: Сарвари барқ ва рамка дар тарафи пеши сутун ба таври амудӣ насб карда шудаанд ва дар баробари роҳи роҳнамоии сутун ба чап ва рост мутақобила мекунанд.
Интиқоли меҳвари Y1: муҳаррики серво AC барои рондани винти тӯб барои ҳаракат додани зин истифода мешавад ва ҳаракати хаттии меҳвари Y1-ро амалӣ мекунад.
Шакли роҳи оҳани роҳнамо: 4 рельси роҳнамоии хатӣ + қӯчқори мураббаъ роҳи оҳани сахт.
2.2.3 Меҳвари Y2: Рақами дуюми сари қудрат амудӣ дар паҳлӯи пеши сутун насб карда шудааст ва дар баробари роҳи роҳнамоии сутун ба чап ва рост ҳаракат мекунад.
Интиқоли меҳвари Y2: муҳаррики серво AC барои рондани винти тӯб барои рондани зин барои ҳаракат ва амалӣ кардани ҳаракати хаттии меҳвари Y2 истифода мешавад.
Шакли роҳи оҳани роҳнамо: 4 рельси роҳнамоии хатӣ + қӯчқори мураббаъ роҳи оҳани сахт.
2.2.4 Меҳвари Z1: Зини чархи сари барқ дар тарафи пеши сутуни рост ба таври амудӣ насб карда шудааст ва дар баробари роҳи роҳнамои сутун ба боло ва поён ҳаракат мекунад.
Интиқоли меҳвари Z1: муҳаррики серво AC ва редуктори сайёраи дақиқ барои рондани қӯчқор ба воситаи винти тӯб барои амалӣ кардани ҳаракати хаттии Z1 - меҳвар истифода мешаванд.
Шакли роҳи оҳани роҳнамо: 2 рельси роҳнамоии хатӣ.
2.2.5 Меҳвари Z2: Зини слайди сари қудрат ба таври амудӣ дар паҳлӯи пеши сутуни рост насб карда шудааст ва дар баробари роҳи роҳнамои сутун ба боло ва поён ҳаракат мекунад.
Интиқоли меҳвари Z1: муҳаррики серво AC ва инчунин редуктори сайёраи дақиқи баланд барои рондани рам ба воситаи винти тӯб барои амалӣ кардани ҳаракати хаттии Z2 - меҳвар истифода мешавад.
Шакли роҳи оҳани роҳнамо: 2 рельси роҳнамоии хатӣ
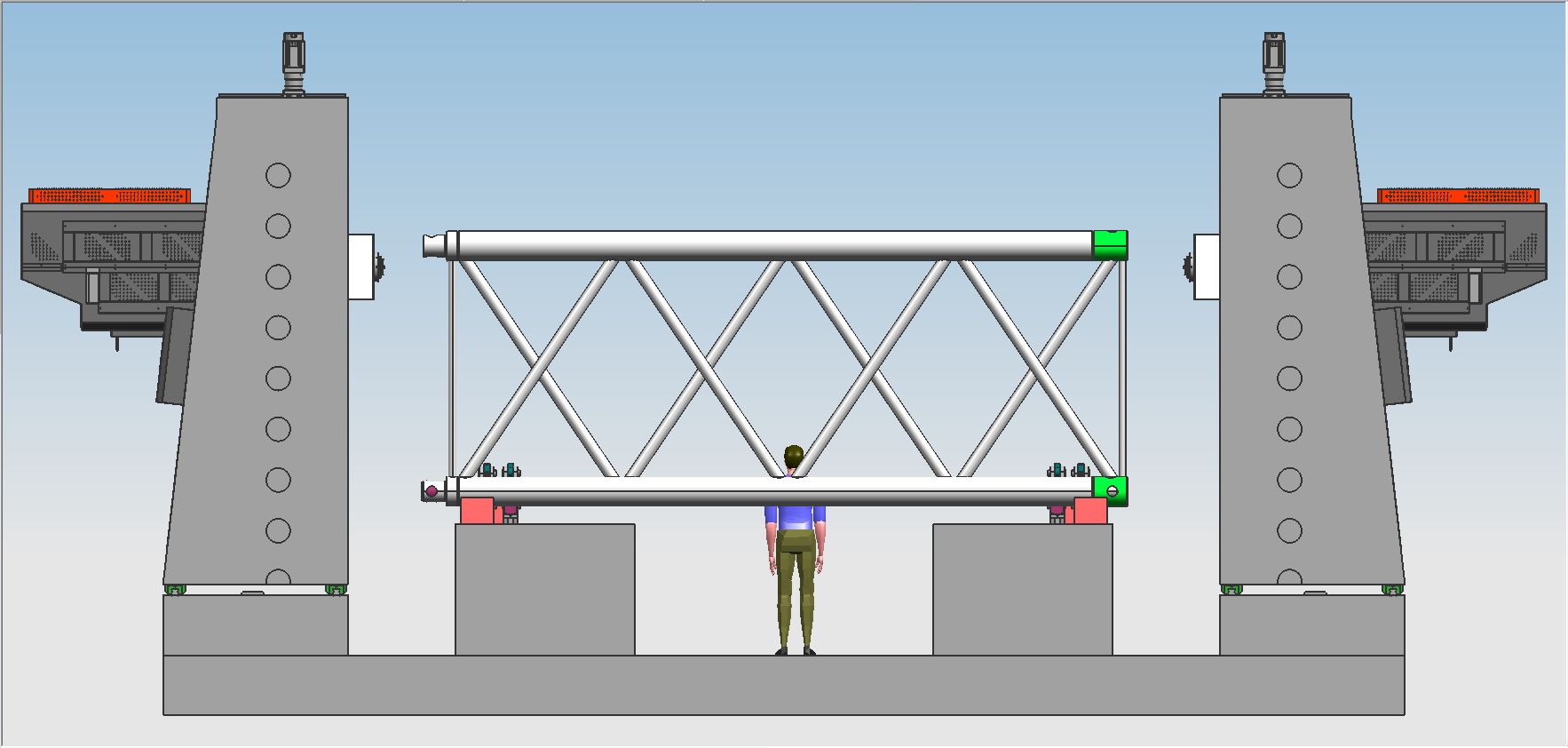
Сарвари барқи дилгиркунанда ва фрезерӣ (аз ҷумла сари қудрати 1 ва 2) як рами мураббаъ буда, самти ҳаракат аз ҷониби 4 рельси роҳнамои ғалтаки хатӣ роҳнамоӣ карда мешавад. Драйвер як муҳаррики серво AC-ро барои рондани ҷуфти винти дақиқи тӯб истифода мебарад. Машина бо бари тавозуни азот чихозонида шудааст. , Иктидори борбардории сари машинаро дар винт ва мотори серво кам кунед. Моторҳои меҳвари Z дорои функсияи тормози автоматӣ мебошад. Дар сурати ходисаи кувваи электр тормози автоматй вали моторро сахт нигох медорад, то ки вай гардиш накунад. Дар вакти кор, вакте ки парма ба порчаи коркунанда нарасад, вай зуд ба кор медарояд; вакте ки парма ба порчаи коркунанда мерасад, он ба таври автоматикй ба хуроки коркунанда мегузарад. Вақте ки парма ба қисмҳои корӣ ворид мешавад, он ба таври худкор ба қафои тез мегузарад; вақте ки нӯги парма аз қисмати кор баромада, ба ҳолати муқарраршуда мерасад, он ба ҳолати сӯрохии навбатӣ мегузарад, то гардиши автоматиро амалӣ созад. Ва он метавонад вазифаҳои пармакунии сӯрохиҳои кӯр, фрезерӣ, кандакорӣ, шикастани чипҳо, хориҷ кардани чипҳои автоматӣ ва ғайраро иҷро кунад, ки ҳосилнокии меҳнатро беҳтар мекунад.


Сарвари қувваи мураббаъ қӯчқори 500 мм зарбаи мураккаб ба ҷои замимаҳои анъанавӣ дастурҳои хатиро истифода мебарад, то дақиқии роҳнаморо ҳангоми нигоҳ доштани сахтии қӯчқори мураббаъ хеле беҳтар кунад.
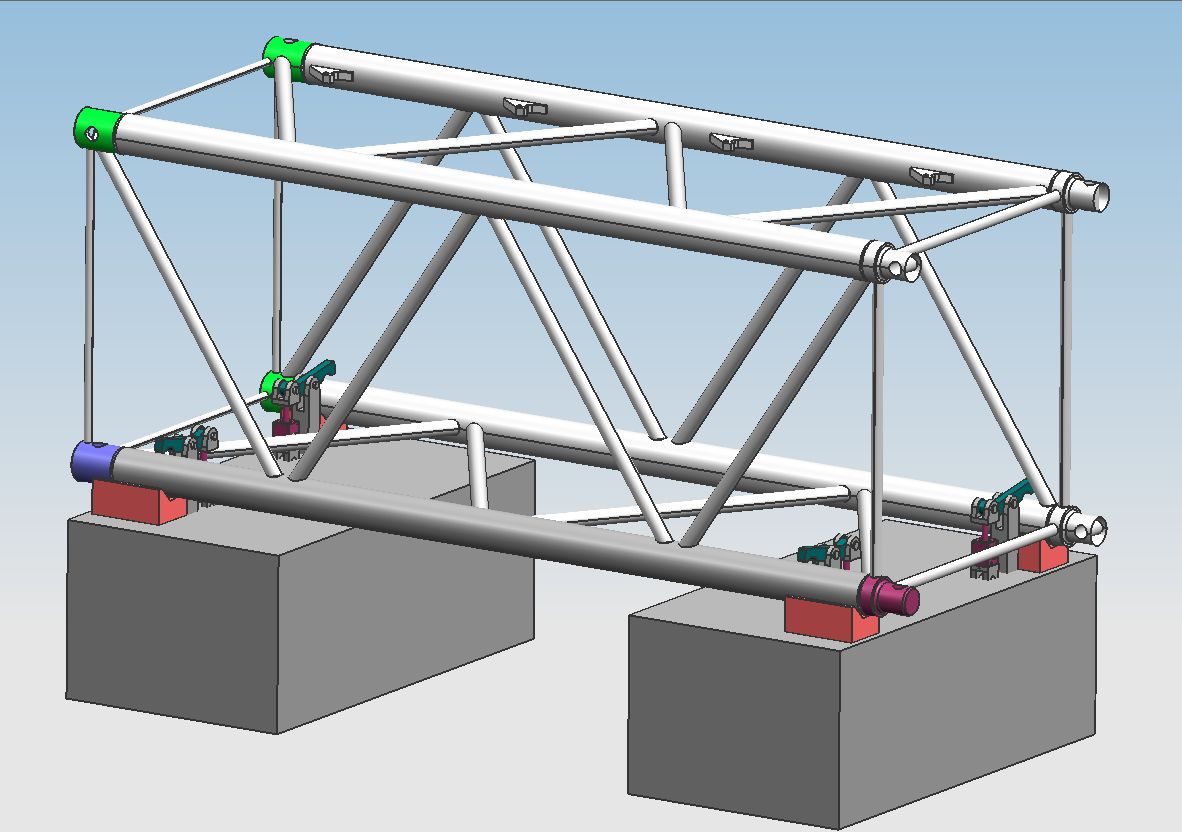
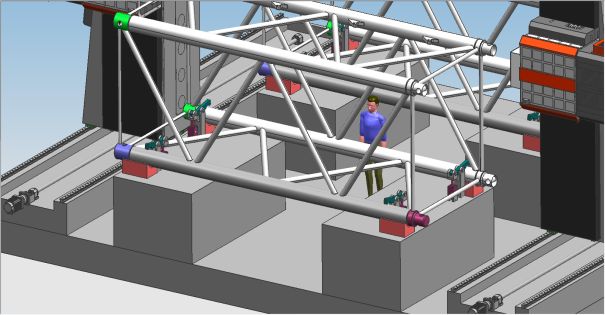
2.3. Функсияи мустаҳкамкунии гидравликии workpiece
2.4Бартараф кардани чипҳо ва хунуккунӣ
Дар поёни мизи корӣ дар ду тараф конвейерҳои чипҳои занҷири спиралӣ ва ҳамвор насб карда шудаанд ва чипҳо метавонанд дар охири ду марҳилаи плитаҳои спиралӣ ва занҷир ба таври худкор ба конвейери чип холӣ шаванд, то истеҳсоли мутамаддинро амалӣ созад. Дар зарфи хунуккунандаи конвейери чип насоси хунуккунанда мавҷуд аст, ки онро барои хунуккунии берунии асбоб истифода бурдан мумкин аст, то кор ва мӯҳлати хидмати асбобро таъмин кунад ва моеъи хунуккуниро дубора коркард кардан мумкин аст.
3. Системаи пурраи рақамии назорати рақамӣ:
3.1. Бо функсияи шикастани чип, вақти шикастани чип ва давраи шикастани чипро дар интерфейси одам-мошин муқаррар кардан мумкин аст.
3.2. Бо функсияи бардоштани асбоб, масофаи бардоштанро дар интерфейси одам-мошин муқаррар кардан мумкин аст. Вақте ки коркард ба ин масофа мерасад, асбоб зуд бардошта мешавад, пас чипҳо партофта мешаванд ва сипас зуд ба сатҳи пармакунӣ пеш мераванд ва ба таври худкор ба кор табдил меёбанд.
3.3. Қуттии мутамаркази идоракунии амалиёт ва дастгоҳи дастӣ системаи идоракунии ададро қабул мекунанд ва бо интерфейси USB ва дисплейи булӯри моеъ муҷаҳҳаз шудаанд. Барои осон кардани барномасозӣ, нигоҳдорӣ, намоиш ва иртибот, интерфейси амалиётӣ дорои функсияҳо ба монанди муколамаи одам ва мошин, ҷуброни хатоҳо ва ҳушдордиҳии автоматӣ мебошад.
3.4. Таҷҳизот дорои функсияи пешнамоиш ва дубора тафтиш кардани мавқеи сӯрох пеш аз коркард мебошад ва амалиёт хеле қулай аст.
4. Молидани автоматӣ
Ҷуфтҳои роҳи оҳани дастури дақиқи асбоби дастӣ, ҷуфтҳои винти дақиқи тӯб ва дигар ҷуфтҳои ҳаракати дақиқи баланд бо системаҳои молидани автоматӣ муҷаҳҳаз шудаанд. Насоси автоматии молиданӣ равғани фишорро мебарорад ва камераи миқдории равғани молиданӣ ба равған ворид мешавад. Пас аз пур кардани камераи равган, вақте ки фишори система то 1,4-1,75Мпа боло меравад, тугмаи фишор дар система баста мешавад, насос қатъ мешавад ва клапани борфарорӣ дар як вақт холӣ мешавад. Вакте ки фишори равган дар рох аз 0,2 Мпа паст мешавад, молидани микдори ба пур кардани нуктаи молидан шуруъ мекунад ва як пуркунии равганро ба анчом мерасонад. Аз сабаби таъминоти дақиқи равғани инжектори миқдории равған ва муайян кардани фишори система, таъминоти нафт боэътимод аст, ки дар рӯи ҳар як ҷуфти кинематикӣ филми равғанӣ мавҷуд аст, сурхшавӣ ва фарсудашавиро коҳиш медиҳад ва аз вайроншавӣ пешгирӣ мекунад. сохтори дохилӣ, ки аз ҳад зиёд гармӣ ба вуҷуд омадааст, барои таъмини дақиқӣ ва ҳаёти асбоби мошин. Дар муқоиса бо ҷуфти роҳи оҳани роҳнамои лағжанда, ҷуфти роҳи оҳани роҳнамоии дар ин асбоб истифодашаванда як қатор бартариҳо дорад:
① Ҳассосияти баланди ҳаракат, коэффисиенти соиши роҳи роҳнамоии ғелонда хурд аст, ҳамагӣ 0,0025-0,01 ва қудрати ронандагӣ хеле кам шудааст, ки танҳо ба 1 техникаи оддӣ баробар аст. /10. ② Тафовут байни фриксияи динамикӣ ва статикӣ хеле хурд аст ва иҷрои минбаъда аъло аст, яъне фосилаи вақти байни сигнали ронандагӣ ва амали механикӣ хеле кӯтоҳ аст, ки барои беҳтар кардани суръати вокуниш ва ҳассосияти системаи назорати рақамӣ.
③Он барои ҳаракати хаттии баландсуръат мувофиқ аст ва суръати фаврии он нисбат ба релсҳои роҳнамоии лағжанда тақрибан 10 маротиба зиёдтар аст. ④ Он метавонад ҳаракати бефосиларо амалӣ кунад ва устувории ҳаракати системаи механикиро беҳтар кунад. ⑤Аз ҷониби истеҳсолкунандагони касбӣ истеҳсол шудааст, он дорои дақиқии баланд, универсалии хуб ва нигоҳдории осон мебошад.
5. Санҷиши лазерии меҳвар:
Ҳар як мошини Bosman аз ҷониби интерферометри лазерии ширкати RENISHAW дар Британияи Кабир барои дақиқ тафтиш ва ҷуброн кардани хатои қатрон, аксуламал, дақиқии ҷойгиршавӣ, дақиқии ҷойгиркунии такрорӣ ва ғайра калибр карда мешавад, то устувории динамикӣ, статикӣ ва дақиқии коркарди мошини. Санҷиши баллбар Ҳар як мошин баллбарро аз ширкати бритониёии RENISHAW истифода мебарад, то дақиқии даври ҳақиқӣ ва дақиқии геометрии мошинро танзим кунад ва ҳамзамон таҷрибаҳои буриши давравӣ гузаронад, то дақиқии коркарди 3D ва дақиқии даврии мошинро таъмин кунад.


6Муҳити асбоби мошин:
6.1. Талаботи муҳити истифодаи таҷҳизот
Нигоҳ доштани сатҳи доимии ҳарорати муҳити атроф омили муҳим барои коркарди дақиқ аст.
(1) Талаботи ҳарорати истифодашавандаи муҳити зист -10 ℃ ~ 35 ℃ аст, вақте ки ҳарорати муҳити зист 20 ℃ аст, намӣ бояд 40 ~ 75% бошад.
(2) Барои нигоҳ доштани дақиқии статикии асбоб дар доираи муқарраршуда, ҳарорати беҳтарини муҳити зист аз 15 ° C то 25 ° C ва фарқияти ҳароратро талаб мекунад
Набояд аз ±2°C/24 соат зиёд бошад.
6.1.2. Шиддати таъминоти барқ: 3 марҳила, 380V, дар доираи ±10% тағирёбии шиддат, басомади таъминоти барқ: 50HZ.
6.1.3. Дар сурати ноустувор будани шиддати минтакаи истифода дастгох бояд бо кувваи муътадил таъмин карда шавад, то кори муътадили дастгох таъмин карда шавад.
6.1.4. Асбоб бояд ба заминкании боэътимод дошта бошад: сими заминканӣ сими мис аст, диаметри сим набояд аз 10 мм² камтар бошад ва муқовимати ба заминканӣ аз 4 Ом камтар бошад.
6.1.5. Барои таъмин намудани кори муътадили тачхизот, агар хавои фишурдашудаи манбаи хаво ба талаботи манбаи хаво чавоб дода натавонад, он бояд ба дастгох гузошта шавад.
Пеш аз ҳаво маҷмӯи дастгоҳи тозакунандаи манбаи ҳаворо илова кунед (намноккунӣ, равғанкашӣ, филтркунӣ).
6.1.6. Таҷҳизотро аз нури бевоситаи офтоб, манбаҳои ларзиш ва гармӣ, генераторҳои баландбасомад, дастгоҳҳои кафшери барқӣ ва ғайра дур нигоҳ доред, то ки ба шикасти истеҳсоли дастгоҳ ё аз даст додани дақиқии асбоб роҳ надиҳед.
7. Тпараметрҳои техникӣ:
| Модели | 6025-6Z | |
| Андозаи коркарди қисмҳои корӣ | Дарозӣ × паҳнӣ × баландӣ (мм) | 6000×2300×2300 |
| Максимум ғизои Gantry | Паҳно (мм) | 6800 |
| андозаи мизи корӣ | Дарозӣ X Бар (мм) | 3000*1000 =4 |
| Сафари сутун | Ҳаракати сутун ба пеш ва қафо (мм) | 7000 |
| Рамзи дукарата боло ва поён бардоред | Зарбаи боло ва поёни рам (мм) | 2500 |
| Маркази шпиндель то масофаи ҳавопаймои ҷадвал | 0-2500мм | |
|
Сарвари пармакунии навъи рами уфуқӣ сари қудрат як ду
| Миқдор (2) | 2 |
| Конуси шпиндель | BT50 | |
| Диаметри пармакунӣ (мм) | Φ2-Φ60 | |
| Диаметри ламс (мм) | М3-М30 | |
| Суръати шпиндель (р/дақ) | 30 ~ 5000 | |
| Қувваи муҳаррики шпиндели серво (кВт) | 37*2 | |
| Масофаи ҳаракат ба чап ва рост байни ду канори шпиндель | 5800-6800мм | |
| Зарбаи чап ва рости рам (мм) | 500 | |
| Дурустии ҷойгиркунии мавқеъ | 300мм*300мм | ±0,025 |
| Дурустии ҷойгиркунии такрории дуҷониба | 300мм*300мм | ±0,02 |
| Андозаҳои асбобҳои мошин | Дарозӣ × паҳнӣ × баландӣ (мм) | Мувофиқи нақшаҳо (агар дар раванди тарроҳӣ тағйирот ворид шавад, мо шуморо огоҳ хоҳем кард) |
| Вазни умумии (т) | 72Т | |