5-Меҳвари амудӣ Маркази Machining V5-700B

Барраси
Маркази коркарди панҷ меҳвари V5-700 B сохтори устувори C-шаклро қабул мекунад ва бо шпиндели барқӣ, гардиши мустақими CNC ва маҷаллаи асбобҳо ҳамчун стандарт муҷаҳҳаз шудааст, ки метавонад коркарди баландсуръат ва дақиқи баланди қисмҳои мураккабро амалӣ кунад. Он дар коркарди фасењ ва самараноки муҳаррикҳои нави энергетикӣ, қуттиҳои редукторҳо, муҳаррикҳо, қолабҳо, таҷҳизоти тиббии роботӣ ва дигар маҳсулот васеъ истифода мешавад.
Тавсифи функсияҳо ва хусусиятҳо
1. Тартиби умумии дастгох
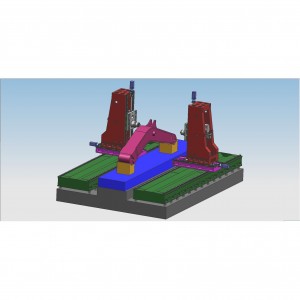
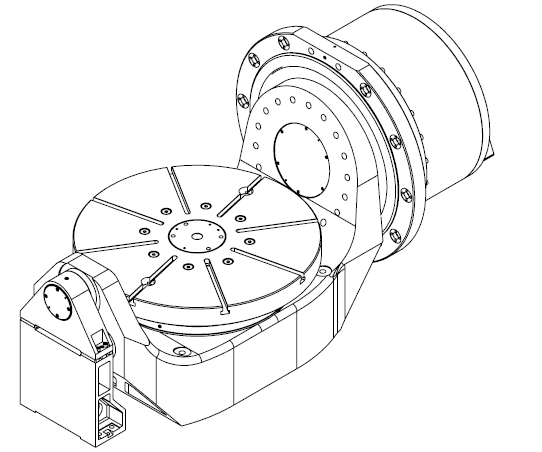
Маркази коркарди панҷ меҳвари V5-700B сохтори устувори C-шаклро қабул мекунад, сутун дар кат ҷойгир карда шудааст, лавҳаи слайд ба таври уфуқӣ дар баробари сутун ҳаракат мекунад (самти X), курсии слайд дар тӯли лавҳаи слайд (самти Y) ҳаракат мекунад ) ва сарпӯши амудӣ дар баробари курсии слайд (самти Z) ҳаракат мекунад. Ҷадвали корӣ сохтори гаҳвораи ягонаи мустақими мустақилро қабул мекунад ва нишондиҳандаҳои гуногуни иҷрои он ба сатҳи пешрафтаи байналмилалӣ расидаанд.
2. Системаи хуроки чорво
Релсҳои роҳнамоии хаттии X, Y, Z-меҳвар ва винтҳои тӯб дорои фриксияи пасти статикӣ ва динамикӣ, ҳассосияти баланд, ларзиши паст дар суръати баланд, ҳаракат дар суръати паст, дақиқии баланди ҷойгиршавӣ ва иҷрои аълои гардонандаи servo мебошанд.
Моторҳои сервои X, Y, Z-меҳвар мустақиман бо винтҳои тӯби дақиқи баланд тавассути муфтаҳо пайваст карда мешаванд, пайвандҳои фосилавиро коҳиш медиҳанд, интиқоли бефосила, ғизодиҳии фасеҳ, ҷойгиркунии дақиқ ва дақиқии баланди интиқолро амалӣ мекунанд.
Моторҳои серво Z-меҳвари дорои функсияи тормоз. Дар сурати аз кор баромадани барқ, тормоз метавонад ба таври худкор чоҳи муҳаррикро сахт нигоҳ дорад, то он гардиш накунад, ки ин нақши муҳофизати бехатариро мебозад.
3. Шпиндели электрики
Шпиндели барқӣ шпиндели электрикии худкори баландсифатро қабул мекунад (патенти ихтироъ: 202010130049.4) ва дар охири он барои хунук кардани асбоб бо соплоҳои хунуккунӣ муҷаҳҳаз карда шудааст. Он дорои бартариҳои суръати баланд, дақиқии баланд ва вокуниши баланди динамикӣ мебошад ва метавонад танзими суръатро дарк кунад. Рамзгузори дақиқи дарунсохт метавонад таваққуфи дақиқи самт ва зарбаи сахтро дарк кунад.

4. Маҷаллаи асбобҳо
Маҷаллаи асбобҳои дискӣ маҷаллаи асбоби манипулятории BT40-ро қабул мекунад, ки метавонад 24 асбобро ҷойгир кунад.

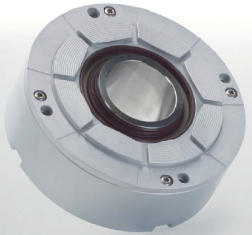
5. Мизи гардишгар
Гаҳвораи гардиши гаҳвораи худидораи мустақим (патентҳои ихтироъ 202010409192.7, 202010408203.X, 2022109170252) бо рамзгузори мутлақи дақиқи баланд муҷаҳҳаз шудааст ва тавассути сардкунандаи об дар ҳарорати доимӣ сард мешавад. Он дорои бартариҳои устувории баланд, дақиқии баланд ва вокуниши динамикии баланд мебошад. Дастгоҳи корӣ 8 радиалии 14 мм-ро қабул мекунад, ки иқтидори ҳадди аксар 500 кг (уфуқӣ) ва 300 кг (амудӣ) мебошад.
| Қувваи номиналӣ (кВт) | Моменти номиналии (Нм) | Суръати номиналӣ (rpm) | Моменти максималӣ (Нм) | Ҷараёни номиналӣ (A) | |
| меҳвари B | 13.3 | 2540 | 50 | 4000 | 46,9 |
| меҳвари C | 3.7 | 700 | 50 | 1400 | 14 |
6. Системаи бозгашти ҳалқаи пурра пӯшида
Меҳварҳои хаттии X, Y ва Z бо тарозуи қубурҳои қимати мутлақи силсилаи HEIDENHAIN LC4 муҷаҳҳаз шудаанд; Мизҳои гардиши B ва C бо рамзгузорҳои кунҷи мутлақи арзиши мутлақи HEIDENHAIN RCN2000 муҷаҳҳаз карда шудаанд, то фикру мулоҳизаҳои пурраи пӯшидаи 5 меҳвари ғизоро амалӣ созанд ва кафолат медиҳанд, ки асбоби мошин дақиқ ва дақиқи баланд дорад. нигоҳ доштани дақиқ.

Бо сардкунандаи об барои сардшавии доимии ҳарорат муҷаҳҳаз шудааст, то боварӣ ҳосил кунад, ки шпиндели барқӣ ва гардиши гардонандаи мустақим дар ҳолати хуб қарор дорад ва метавонад барои муддати тӯлонӣ самаранок кор кунад.
Системаи пневматикӣ бо ҷузъҳои пневматикӣ филтр карда мешавад, то вазифаҳои тоза кардан ва дамидани сӯрохи конусии чоҳи асосӣ, муҳофизати ҳавоии подшипникҳои асосии чоҳ ва гардиши маҷаллаи асбобҳо ва дорандаи асбобҳоро иҷро кунад.
8. Системаи марказонидашудаи молиданй
Блоки слайди рельси роҳнамо ва гайкаи винти тӯб як дастгоҳи молидани мутамарказро бо равғани борик қабул мекунад, ки молидани мунтазам ва миқдориро таъмин мекунад, то дақиқӣ ва устувории винти тӯб ва роҳи роҳнаморо таъмин кунад.
9. Системаи молидании равган-хаво
Шпиндели электрики барои пурра молидан ва хунук кардани шпиндель бо асбоби молидании равган-хавои импортй чихозонида шудааст. Сенсор барои таъмин кардани ҳушдор барои молидани ғайримуқаррарӣ муҷаҳҳаз шудааст ва самаранокии онро таъмин мекунад, ки шпиндель метавонад дар муддати тӯлонӣ бо суръати баланд кор кунад.
10. Системаи ченкунии қисмҳои корӣ
Асбоби мошина бо зонди сенсории HEIDENHAIN TS460 ва қабулкунаки сигнали бесим муҷаҳҳаз аст, ки мумкин аст дар шпиндель тавассути системаи тағир додани асбоби дастӣ ё худкор насб карда шавад, то вазифаҳои ҳамоҳангсозии қисмҳои корӣ, андозагирии қисмҳои кор ва танзими нуқтаи пешакӣ муқаррар карда шаванд ва такроршавандагии андозагирӣ ≤ 1um (суръати санҷиш 1 м / дақ), ҳарорати корӣ аз 10 ° C то 40 ° C аст. Санҷиши сенсории HEIDENHAIN тавассути калиди оптикӣ ба кор андохта мешавад. Стилус подшипникҳои се-нуқтаро истифода мебарад, то мавқеи беҳтарини давлатиро таъмин кунад. Он ҳангоми истифода фарсуда намешавад, такроршавандагии пайваста дорад ва барои муддати тӯлонӣ устувор аст.


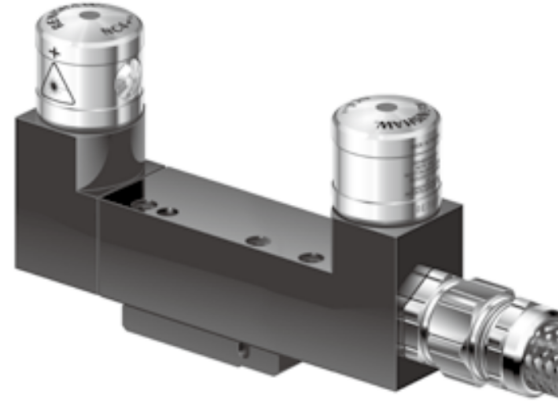
11. Системаи ченкунии асбобҳо
Асбоби мошин бо асбоби танзимкунии асбоби лазерии Renishaw NC4 муҷаҳҳаз аст, такроршавандагии андозагирӣ ± 0.1um ва ҳарорати корӣ аз 5 ° C то 50 ° C аст.
12. Калибрченкунии дақиқи панҷ меҳвар
Асбоб бо тӯбҳои калибркунии KKH аз HEIDENHAIN дар якҷоягӣ бо зондҳои силсилаи TS барои ноил шудан ба калибркунии дақиқи меҳвари гардиши асбоб, кам кардани хатогиҳо ҳангоми ҳаракати асбоб ва ноил шудан ба дақиқии баланд ва такроршавандагии баланд муҷаҳҳаз шудааст.

(1) Таъмини барқ: 380V ± 10% 50HZ ± 1HZ се марҳилаи AC
(2) Ҳарорати муҳити зист: 5°C-40°C
(3) Ҳарорати беҳтарин: 22°C-24°C
(4) Рутубати нисбӣ: 40-75%
(5) Фишори манбаи ҳаво: ≥6 бар
(6) Меъёри ҷараёни манбаи газ: 500 л/дақ
15. Функсияи ҷорӣ намудани системаи CNC

Системаи CNC HEIDENHAIN TNC640
(1) Шумораи меҳварҳо: то 24 ҳалқаҳои назоратӣ
(2) Версияи экрани сенсорӣ бо амалиёти чандрасонаӣ
(3) Вуруди барнома: барномасозии гуфтугӯии Klartext ва рамзи G (ISO).
(4) Барномасозии ройгони контурии FK: бо истифода аз забони барномасозии гуфтугӯии Klartext барои иҷрои барномасозии контурии ройгони FK бо дастгирии графикӣ
(5) Давраи фаровони фрезер ва пармакунӣ
(6) Ҷуброни асбоб: ҷуброни радиуси асбоб ва ҷуброни дарозии асбоб. Давраи санҷиш
(7) Маълумоти буриш: Ҳисобкунии автоматии суръати шпиндель, суръати буриш, ғизо дар як майса ва ғизо дар як давра
(8) Суръати коркарди доимии контур: нисбат ба роҳи маркази асбоб / нисбат ба канори асбоб
(9) Иҷрои мувозӣ: Барнома бо дастгирии графикӣ ҳангоми кор кардани барномаи дигар
(10) Унсурҳои контурӣ: хати рост / рахи камон / маркази доира / радиуси доира / камон ба таври тангенсиалӣ пайваст / кунҷи мудаввар
(11) Наздик шудан ва дур шудан аз контурҳо: роҳҳои тангенсиалӣ ё перпендикуляр/тавассути камон
(12) Ҷаҳиш ба барнома: зерпрограмма/ такрори блоки барнома/ ягон барнома метавонад зерпрограмма бошад
(13) Давраи консервшуда: пармакунӣ, ламскунӣ (бо ва ё бидуни чаҳорчӯбаи шинокунандаи лампа), холигии росткунҷа ва камон. Пармакунии пек, реаминг, дилгиркунанда, рӯ ба рӯ шудан, пармакунии нуқта. Фрезер кардани риштаҳои дохилӣ ва берунӣ. Ноҳамвор кардани сатҳи ҳамвор ва моил. Коркарди пурраи кисахои росткунча ва даврашакл, сарварони росткунча ва даврашакл. Давраҳои ноҳамвор ва анҷом додани чуқуриҳои рост ва даврашакл. Нуқтаҳои массив дар доираҳо ва хатҳо. Нуқтаи массив: рамзи QR. Занҷири контурӣ, ҷайби контурӣ. Чуқури контурӣ барои фрезери трохойалӣ. Давраи кандакорӣ: кандакорӣ кардани матн ё рақамҳо дар хати рост ё камон.
(14) Табдилдиҳии координатҳо: тарҷума, гардиш, оинасозӣ, миқёскунӣ (меҳвари мушаххас).
(15) Барномасозии тағирёбандаи параметри Q: функсияи математикӣ, амалиёти мантиқӣ, амалиёти қавс, арзиши мутлақ, доимии þ, радкунӣ, адади бутун ё даҳӣ, функсияи ҳисобкунии доира, функсияи коркарди матн.
(16) Воситаҳои барномасозӣ: ҳисобкунак. Рӯйхати ҳамаи паёмҳои хатогии ҷорӣ. Функсияи кӯмак ба контекст барои паёмҳои хатогӣ. TNCguide: системаи ёрии ҳамгирошуда; TNC 640 маълумотро бевосита аз дастури корбар намоиш медиҳад. Дастгирии графикӣ барои барномасозии давра. Блокҳои шарҳҳо ва блокҳои асосӣ дар барномаҳои NC.
(17) Гирифтани маълумот: бевосита мавқеи воқеиро дар барномаи NC истифода баред.
(18) Графикаи санҷиши барнома: Моделсозии графикии амалиёти коркардро ҳатто ҳангоми кор кардани барномаи дигар иҷро кардан мумкин аст. Намоиши боло/намоиши се-ченака/намоиши стерео, ва ҳавопаймои коркарди моил/расми хати 3-D. Миқёси маҳаллӣ.
(19) Дастгирии графикии барномасозӣ: Ҳатто агар барномаи дигар кор кунад ҳам, графикаи (диаграммаи пайгирии дастнависи 2-D) сегменти барномаи NC дар ҳолати кори таҳрири барнома намоиш дода мешавад.
(20) Барномаи графикии иҷрошаванда: симулятсияи графикии вақти воқеӣ ҳангоми иҷрои барномаи фреза. намуди боло / се намуди / намуди стерео.
(21) Вақти коркард: Вақти коркардро дар реҷаи кории "озмоиши санҷиш" ҳисоб кунед. Вақти коркарди ҷорӣро дар реҷаи кори "Иҷрои барнома" нишон медиҳад.
(22) Бозгашт ба контур: намоиши вақти коркарди ҷорӣ дар ҳолати кори "барнома иҷрошуда". Қатъи барнома, рафтан ва баргаштан ба контур.
(23) Идоракунии нуқтаи пешакӣ: ҷадвал барои захира кардани ҳама гуна нуқтаи пешакӣ.
(24) Ҷадвали пайдоиш: ҷадвалҳои пайдоиши сершумор, ки барои нигоҳ доштани пайдоиши нисбии порчаи кор истифода мешаванд.
(25) 3-D Machining: Назорати ҳаракат аз Jerk ҳамвор сифати баланд
(26) Вақти коркарди блок: 0,5 мс
(27) Ҳалли вуруд ва қадами намоиш: 0,1 мкм
(28) Давраи андозагирӣ: калибрченкунии зонд. Ҷуброни дастӣ ё автоматии нодурусти қисмҳои корӣ. Нуқтаҳои пешакӣ муқарраршударо дастӣ ё худкор таъин кунед. Асбоб ва порчаи кориро ба таври автоматй чен кардан мумкин аст.
(29) Ҷуброни хатогӣ: хатогии меҳвари хатӣ ва ғайрихаттӣ, зарбаи баръакс, кунҷи баръакси ҳаракати даврашакл, хатои баръакс, васеъшавии гармӣ. фриксияи статикӣ, соиши лағжиш.
(30) Интерфейси маълумот: RS-232-C/V.24, то 115 кбит/с. Интерфейси васеъшудаи додаҳои протоколи LSV2, истифода баред HEIDENHAIN TNCremo ё TNCremoPlus нармафзори TNC тавассути ин интерфейси додаҳо фосилаи дурро идора кунед. 2 х интерфейси Gigabit Ethernet 1000BASE-T. 5 х портҳои USB (1 порти пеши USB 2.0, 4 бандарҳои USB 3.0).
(31) Ташхис: Воситаҳои ташхиси мустақил барои ҳалли зуд ва қулай мушкилот.
(32) Хонандаи CAD: намоиши файлҳои формати стандартии CAD.
Параметри асосӣ
| Адад | Воҳиди | Параметр | |
| Мизи корӣ | Диаметри мизи корӣ | mm | Φ700 |
| Максимум сарбории уфуқӣ | kg | 500 | |
| Максимум сарбории амудӣ | kg | 300 | |
| T-ковокии | mm | 8×14 | |
| Диапазони коркард | Масофа байни рӯи охири шпиндель ва рӯи охири мизи корӣ (Макс) | mm | 600 |
| Масофа байни рӯи охири шпиндель ва рӯи охири мизи корӣ (дақ.) | mm | 150 | |
| меҳвари X | mm | 700 | |
| меҳвари Y | mm | 550 | |
| меҳвари Z | mm | 450 | |
| меҳвари B | ° | -35~+110 | |
| меҳвари C | ° | 360 | |
| Шпиндель | Taper | BT40 | BT40 |
| Суръати номиналӣ | чархзании | 2000 | |
| Макс. суръат | чархзании | 15000 | |
| Моменти баромади S1/S6 | Нм | 72/88 | |
| Қувваи муҳаррики шпиндель S1/S6 | KW | 15/18.5 | |
| Меҳвар | Меҳвари X Суръати ҳаракати босуръат | м/дақ | 36 |
| Меҳвари Y Суръати ҳаракати босуръат | м/дақ | 36 | |
| Меҳвари Z Суръати ҳаракати босуръат | м/дақ | 36 | |
| Меҳвари B Макс. суръат | чархзании | 80 | |
| Меҳвари C Макс. суръат | чархзании | 80 | |
| Қувваи муҳаррики меҳвари X/Y/Z | Kw | 3.6/3.6/2 | |
| Қувваи муҳаррики меҳвари B / C | Kw | 13,3 / 3,7 | |
| B/C моменти номиналии меҳвари | Нм | 2540/700 | |
| Маҷаллаи асбобҳо | Навъи |
| Навъи диск |
| Усули интихоби асбоб |
| Интихоби асбоби дуҷонибаи наздиктарин | |
| Иқтидор | T | 30 | |
| Макс. дарозии асбоб | mm | 300 | |
| Макс. вазни асбоб | kg | 8 | |
| Макс. Диаметри диски буриш (Асбоби пурра) | mm | φ80 | |
| Диаметри максималии диски буриш (асбоби холии ҳамсоя) | mm | φ150 | |
| Дақиқӣ | Меъёрҳои иҷроиш |
| GB/T20957.4 (ISO10791-4) |
| Аниқии ҷойгиршавӣ (X/Y/Z) | mm | 0,008/0,008/0,008 | |
| Аниқии ҷойгиршавӣ (B/C) |
| 7″/7″ | |
| Дурустии ҷойгиркунии такрорӣ | X-меҳвари/Y-меҳвари/Z-меҳвари | mm | 0,006/0,006/0,006 |
| В-меҳвари/С-меҳвари |
| 5″/5″ | |
| Вазн | kg | 8000 | |
| Иқтидор | КВА | 45 | |
Рӯйхати конфигуратсияи стандартӣ
| Не. | Ном |
| 1 | Унсурҳои асосӣ (аз ҷумла кат, сутун, лавҳаи слайд, курсии слайд, сарпӯш) |
| 2 | X, Y, Z системаи хўроки се меҳвари |
| 3 | Бозуи ягонаи гаҳвораи гардиш BC630 |
| 4 | Шпиндели электрикии BT40 |
| 5 | Системаи назорати барқ (аз ҷумла шкафҳои барқӣ, модули таъминоти барқ, модули серво, PLC, панели амалиётӣ, дисплей, дастгоҳи дастӣ, кондитсионери шкафи барқӣ ва ғайра) |
| 6 | Миқёси ҷадвал: HEIDENHAIN |
| 7 | Системаи гидравликӣ |
| 8 | Системаи пневматикӣ |
| 9 | Системаи марказонидашудаи молидани |
| 10 | Системаи молидани равған-ҳаво |
| 11 | Конвейери чип, зарфи об, коллектори чип: RAL7021 хокистарии сиёҳ |
| 12 | Об сардкунанда |
| 13 | Дастгоҳи ченкунии қисмҳои корӣ: HEIDENHAIN TS460 |
| 14 | Асбоби танзимкунии асбоб: Renishaw NC4 |
| 15 | Калибрченкунии дақиқи панҷ меҳвар: HEIDENHAIN KKH |
| 16 | Посбони роҳи оҳан |
| 17 | Сарпӯши умумии муҳофизатии асбоби мошин |
| 18 | Дар асоси як нуқтаи истифодаи нармафзори пас аз коркарди HPMILL, суроғаи физикии компютерро пайваст кунед |
| 19 | Функсияи ҷуброни дарозшавии гармии шпиндель |